2.バイブロドライバ(油圧バイブロハンマー)
2−5可変振幅と偏心体位置
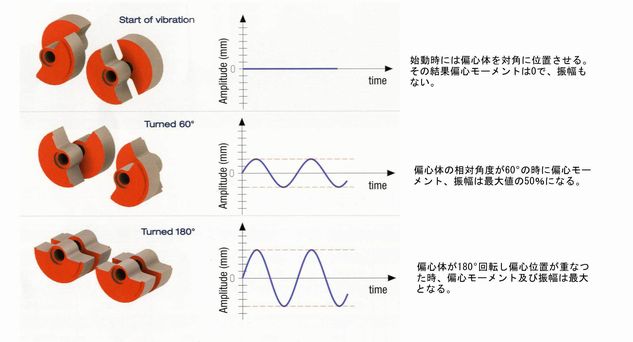
油圧によって偏心体の角度を制御する事によって変心モーメントを0から最大値に変化させ振幅を変動させる。振幅は最小から最大迄無段制御ができる。